スマートカーに興味が出てきたってぇ話
目次
ロボティクスに魅せられて

※本題とは関係ありません。
最初に書いておくけど、この投稿には技術的なことはあまりないのであしからず。
2023年から2024年にかけて立て続けに同じ系列のNHKの番組見て感化されてしまった。
私が見ていたのが、 ABUロボコン と、高専ロボコン と 魔改造の夜 。
ソフトウェアによる機械制御の難しさと素晴らしさを見せてくれるなんともよい番組である。
見ているとやりたくなってくるもので、私にもできないものかと試してみたくなって、いろいろ探してみた。
そしたら出てくる出てくるいろんな製品。
学習用キットでさえ、かなり高度なことができる。
いまやこんなに進化していたのかと、かなり驚愕した。
これで私もPS5のコントローラとタブレットを駆り、ウインウインできるのかと想像してワクワクする。
そして購入へ
んで、何を買うかという前に、そいつに何をさせるかをまず考える。
Kerberos
先ずは主が不在のときに家の見張りが出来れば良いかなと。
要は番犬。
車にセンサデバイスごっちゃりで自走型のスマートカーを。
ん?番犬?
ARMS
もしくは電子制御出来ないもの(市販のコーヒーメーカとかヨーグルトメーカのように電源いれるだけでは動いてくれないものたち)をリモートで操作してくれる。
主のサポート役。
車にちょっとしたアームのようなものを付けたオートメーションデバイスかな。
too much powerです。
こんなところかな。
前者も後者も想像は出来るけど、どうやってつくるかははてさて、、。
どっちが初期投資が安いかというと、前者は既存のセンサは持っているので、スマートカーを買えばひとまずよい。
一方、後者は車の部分とアームも買わないといけないし、それを接合させなくてはいけない。
ということで、最初は前者のスマートカーを作るところが目標かな。
てことで、買ったのがこれ。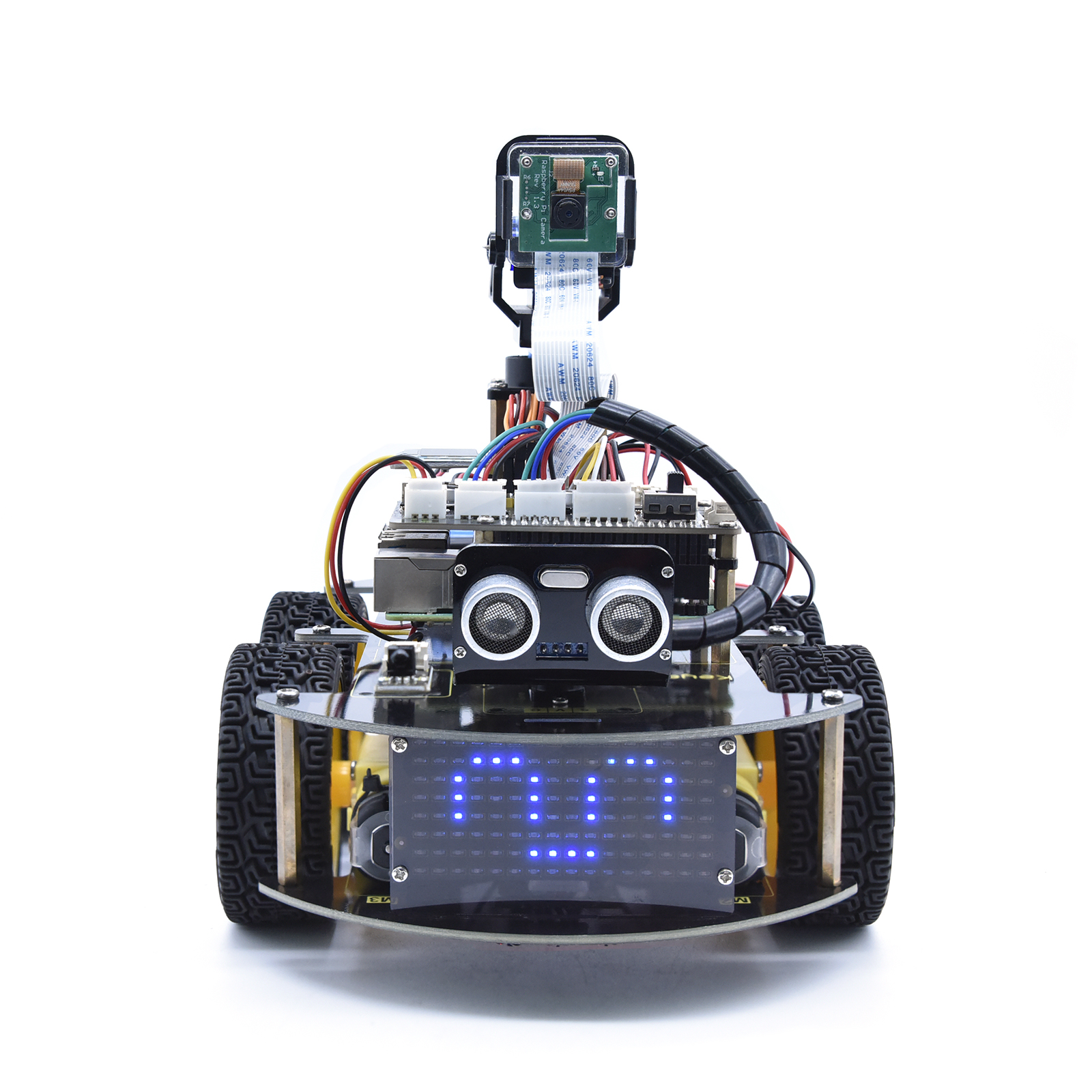
Assembly car
ネットのマニュアルで組み立ててゆく。
プラモデルよりもかなり簡単で、誰でも組み立てられると思う。
ただ、組み立ては誰でもできてもスマートカーはここからが本番。
ラズパイの構築と、センサやらモータデバイスの制御がこの遊びの肝。
Build Raspberry Pi
さてさて、スマートカーの心臓部、ラズベリーパイ。
ここは仕様ではRaspberry Pi4Bとなっていたが、家にあるのが3Bと5しかなかったので、3bを使ってみた。
SDにImageを焼いて起動するだけ。
どうなるか心配だったが、なんとかなるようだ。
ちなみに5だとカメラのケーブルが合わない。

Check the devices
サンプルプログラムで全てのデバイスの制御を確認。
つまずくところが何回かあったが、ま、なんとかなった。
ここではどんなデバイスがあるかのみを紹介。
組み合わせて家の番犬にできるぐらいのことはできそうだ。
Buzzer
パッシブブザーが付いているので、周波数を制御したら単純なメロディを流すこともできる。
Line Tracking Sensor
車体の底面に付いている赤外線送受信管を使ってライントラッキングができる。
仕組みは簡単、赤外線送信して反射したのを受信センサで捉えて0を返す。
受信できなかったら1。
黒いラインに赤外線が反射するので、それでセンサの真下の状態がわかると。
さらに左・中央・右に3つのセンサをつけているので、黒いラインから外れそうになるのが分かって、ステアリングを切って常に黒い線の真ん中を走らせることができる。
さらにバーコードみたいなラインを作って床から情報を取得することもできそう。
マジで面白い。
Ultrasonic Sensor
超音波センサを使って物体を発見することができて、さらにその物体との距離を知ることができる。
仕組みはいたって簡単。
超音波の送受信モジュールをひとつずつ使って、超音波信号を送り続け、物体にあたったら信号が返ってくるので、その返ってくるまでの時間をみて距離を出すと。
超音波は通常の環境下においては音速343m/sで進むので、小学校の時に習ったはじきの公式で距離が簡単に出せる。
distance = speed * time
0.001秒かかったら、約34.3cm、、ではなく、音波が返ってくるまでの時間が0.001秒なので、距離は半分。
distance = speed * time / 2
なので、約17.2cm。めちゃ簡単。
Let’s call it a day
今日はここまで。
続きはまた今度。